Toggle navigation
首页
(current)
问答
文章
话题
商城
登录
注册
6、RDA8910CSDK二次开发:一种新的外设----串口
csdk
RDA8910
air724UG
串口
# 目录 [点击这里查看所有博文](https://blog.csdn.net/weixin_44570083/article/details/104285283) 本系列博客所诉资料`均来自合宙官方`,并不是本人原创(只有博客是自己...
# 目录 [点击这里查看所有博文](https://blog.csdn.net/weixin_44570083/article/details/104285283) 本系列博客所述资料`均来自合宙官方`,并不是本人原创(只有博客是自己写的),csdk只是得到了`口头的允许公开授权`。出于热心,本人将自己的所学笔记整理并推出相对应的使用教程,方面其他人学习。为国内的物联网事业发展尽自己的一份绵薄之力,`没有为自己谋取私利的想法`。若出现侵权现象,请告知本人,本人会立即停止更新,并删除相应的文章和代码。 本系列博客基于紫光展锐的`RDA8910 LTE Cat 1` bis芯片平台开发。理论上适用于合宙的Air720U、Air724U、广和通L610以及安信可的cat-01模块。 先不管支不支持,如果你用的模块是是紫光展锐的RDA8910,那都不妨一试,也许会有意外收获(`也有可能变砖,慎重!!!`)。 我使用的是`Air724UG`开发板,如果在其他模块上不能用,那也不要强怼,也许是开发包不兼容吧。这里的代码是没有问题的。例程仅供参考! # 一、前言 串行接口简称串口,也称串行通信接口或串行通讯接口,是采用串行通信方式的扩展接口。串行接口 (Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。 * 串口通讯协议简介 串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,大部分电子设备都支持该通讯方式,电子工程师在调试设备时也经常使用该通讯方式输出调试信息,因为Air724U自有一个USB端口用于程序下载和log打印,所以这里主要是讲怎么和其他的单片机或者通讯,不建议用来打印调试信息。 * 串口通讯的波特率 串口通讯是一种异步通信,异步通讯中由于没有时钟信号,所以两个通讯设备之间需要约定好波特率,即每个码元的长度,以便对信号进行解码。常见的波特率为9600、19200、115200等。 * 通讯的起始和停止信号 串口通讯的一个数据包从起始信号开始,直到停止信号结束。数据包的起始信号由一个逻辑 0的数据位表示,而数据包的停止信号可由 0.5、1、1.5或 2 个逻辑 1 的数据位表示,只要双方约定一致即可。 * 数据位长度 在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为 5、6、7或 8位长。 * 数据校验 在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)以及无校验(noparity)。在无校验的情况下,数据包中不包含校验位。 > 以上内容引用[开源一小步的ESP32的两个UART实验](https://blog.csdn.net/qq_24550925/article/details/85335709)有兴趣的自行了解 # 二、开发板硬件部分 翻看数据手册,发现芯片一共具有五个串口,其中串口1还具有硬件流控的功能。我们所熟悉的stm32串口一键下载电路就是通过流控来控制开发板进入下载模式。 ### 2.1、UART1/UART2 我所选用的开发板,预留了一个用于串口通讯的usb口。通过如下图所示的开关,进行串口1和串口2的切换。   ### 2.2、UART3/Host UART/ZSP UART 这三个串口官方将其全部引出,从模块背面就能看到引脚位置。 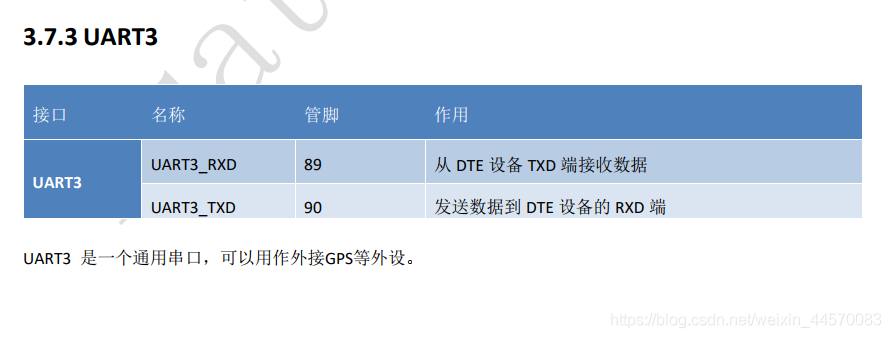 串口3官方将其引出。   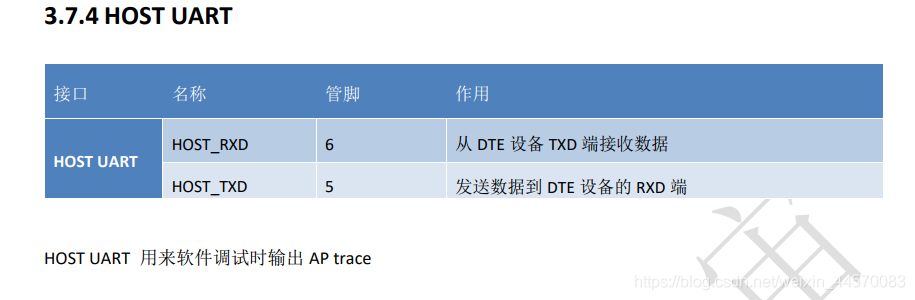  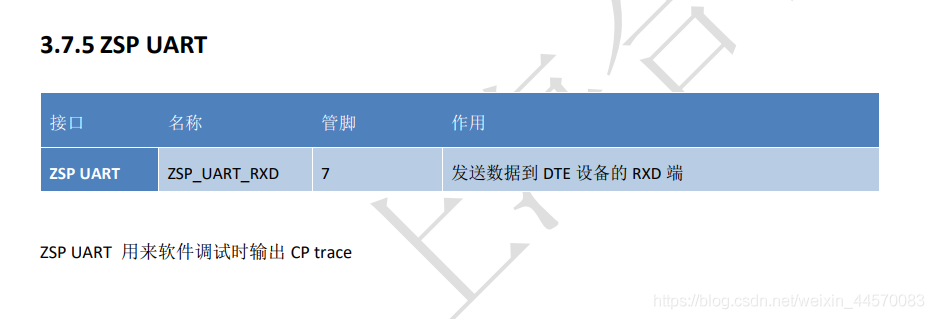  ### 2.3、电平转化 需要注意如果使用Air724U的串口和其他的单片机进行通讯,需要进行电平转换,不可直接与其他单片机相连。 官方给出了一个电平转化电路的参考电路。 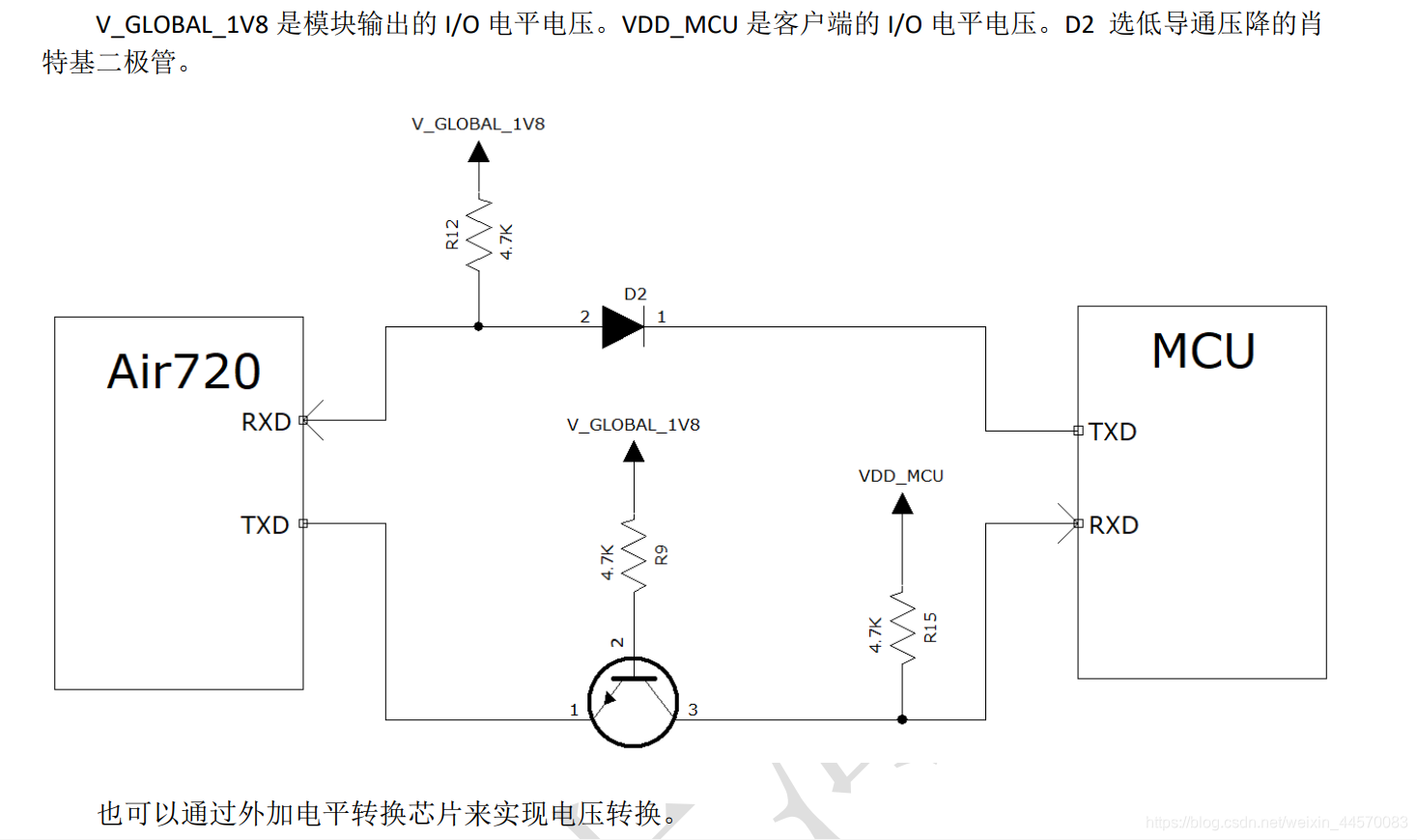 首先看第一条线路,MCU发送,Air720接收这一条线路。当MCU的TXD引脚输出高电平时,二极管D2截止,Air720的RXD引脚被1.8v电源拉高。当MCU的TXD引脚输出低电平时,二极管D2导通,Air720的RXD引脚直接接入MCU的TXD引脚。这样就能确保Air720能够接收到MCU发出的高低电平信号,并且输入的高电平不会高于1.8V。 然后看第二条线路,MCU接收,Air720发送这一条线路。当Air的TXD引脚输出高电平时,三极管截止,MCU的RXD引脚被VDD_MCU电源拉高。当Air的TXD引脚输出低电平时,三极管导通,MCU的RXD引脚直接接入Air的TXD引脚。这样就能确保MCU能够接收到Air发出的高低电平信号,并且输入的高电平能够符合MCU的VDD电平需求。 有人可能会讲第二条线路为什么不用一个二极管,直接和第一条线路的参考电路一致。本电路适用于MCU的VDD>1.8v。当第二条线路使用二极管时,如果MCU的VDD大于1.8v,当Air输出高电平时也就是1.8v,此时二极管两端仍会存在压降,二极管并不会截止,MCU的RXD`就不会被有效的拉高`。此时Air发出的高电平部分会丢失,并且`Air的TXD引脚会接入更高的电压`,一旦超过耐压值。严重会导致Air引脚损坏。 # 三、编写测试程序 ## 3.1、了解本例程所用到的函数 使用串口的驱动需要包含`#include "iot_uart.h"`头文件,我们这里只用到了五个函数,分别是: >/**打开uart *@param port: UART 编号 *@param cfg: 配置信息 *@return TRUE: 成功 * FALSE: 失败 **/ * BOOL `iot_uart_open`(E_AMOPENAT_UART_PORT port,T_AMOPENAT_UART_PARAM *cfg) > /**读uart *@param port: UART 编号 *@param buf: 存储数据地址 *@param bufLen: 存储空间长度 *@param timeoutMs: 读取超时 ms *@return UINT32: 实际读取长度 **/ * UINT32 `iot_uart_read`(E_AMOPENAT_UART_PORT port,UINT8* buf,UINT32 bufLen, UINT32 timeoutMs) > /**写uart *@param port: UART 编号 *@param buf: 写入数据地址 *@param bufLen: 写入数据长度 *@return UINT32: 实际读取长度 **/ * UINT32 `iot_uart_write`(E_AMOPENAT_UART_PORT port, UINT8* buf,UINT32 bufLen) ## 3.2、编写主程序 主程序里主要做了两件事,就是分别对串口1和串口2进行初始化,两者参数完全一致,唯一一个不同的地方就是两者的消息回调函数不一样。 ```c T_AMOPENAT_UART_PARAM uartCfg = {0}; BOOL err = 0; uartCfg.baud = OPENAT_UART_BAUD_115200; //波特率 uartCfg.dataBits = 8; //数据位 uartCfg.stopBits = 1; // 停止位 uartCfg.parity = OPENAT_UART_NO_PARITY; // 无校验 uartCfg.flowControl = OPENAT_UART_FLOWCONTROL_NONE; //无流控 uartCfg.txDoneReport = FALSE; //发送完成不通知 uartCfg.uartMsgHande = uart1_recv_handle; //回调函数 err = iot_uart_open(OPENAT_UART_1, &uartCfg); //初始化串口1 while (!err) { iot_debug_print("OPENAT_UART_1 open FALSE"); iot_os_sleep(1000); } uartCfg.uartMsgHande = uart2_recv_handle; //回调函数 err = iot_uart_open(OPENAT_UART_2, &uartCfg); //初始化串口2 while (!err) { iot_debug_print("OPENAT_UART_2 open FALSE"); iot_os_sleep(1000); } ``` ## 3.3、编写消息回调函数 回调函数中做的事情也很简单,主要是将接收到的数据,进行格式化后再通过串口发送出去。只有一个要注意的地方就是调用`iot_uart_read`读取消息后,需要根据接收到的数据长度,在缓存区末尾加上`\0`。 ```c uint8 *recv_buff = NULL; uint8 dataLen = evt->param.dataLen; if (dataLen) { if (evt->evtId = OPENAT_DRV_EVT_UART_RX_DATA_IND) { recv_buff = iot_os_malloc(dataLen); if (recv_buff == NULL) { iot_debug_print("uart1_recv_handle_0 recv_buff malloc fail %d", dataLen); } uint8 len = iot_uart_read(OPENAT_UART_1, recv_buff, dataLen, 25); recv_buff[len] = '\0'; if (len) { char buf[100] = {0}; sprintf(buf, "uart1 recv dadalen:%d,data:%s\r\n", len, recv_buff); iot_debug_print(buf); iot_uart_write(OPENAT_UART_1, buf, strlen(buf)); } } } ``` # 三、编译并下载程序 完整代码在这,自取。 ```c /* * @Author: your name * @Date: 2020-05-19 14:05:32 * @LastEditTime: 2020-05-22 13:39:40 * @LastEditors: Please set LastEditors * @Description: In User Settings Edit * @FilePath: \RDA8910_CSDK\USER\user_main.c */ #include "string.h" #include "cs_types.h" #include "osi_log.h" #include "osi_api.h" #include "am_openat.h" #include "am_openat_vat.h" #include "am_openat_common.h" #include "iot_debug.h" #include "iot_uart.h" #include "iot_os.h" #include "iot_gpio.h" #include "iot_pmd.h" #include "iot_adc.h" #include "iot_vat.h" void uart1_recv_handle(T_AMOPENAT_UART_MESSAGE *evt) { uint8 *recv_buff = NULL; uint8 dataLen = evt->param.dataLen; if (dataLen) { if (evt->evtId = OPENAT_DRV_EVT_UART_RX_DATA_IND) { recv_buff = iot_os_malloc(dataLen); if (recv_buff == NULL) { iot_debug_print("uart1_recv_handle_0 recv_buff malloc fail %d", dataLen); } uint8 len = iot_uart_read(OPENAT_UART_1, recv_buff, dataLen, 25); recv_buff[len] = '\0'; if (len) { char buf[100] = {0}; sprintf(buf, "uart1 recv dadalen:%d,data:%s\r\n", len, recv_buff); iot_debug_print(buf); iot_uart_write(OPENAT_UART_1, buf, strlen(buf)); } } } } void uart2_recv_handle(T_AMOPENAT_UART_MESSAGE *evt) { uint8 *recv_buff = NULL; uint8 dataLen = evt->param.dataLen; if (dataLen) { if (evt->evtId = OPENAT_DRV_EVT_UART_RX_DATA_IND) { recv_buff = iot_os_malloc(dataLen); if (recv_buff == NULL) { iot_debug_print("uart1_recv_handle_0 recv_buff malloc fail %d", dataLen); } uint8 len = iot_uart_read(OPENAT_UART_2, recv_buff, dataLen, 25); recv_buff[len] = '\0'; if (len) { char buf[100] = {0}; sprintf(buf, "uart2 recv dadalen:%d,data:%s\r\n", len, recv_buff); iot_debug_print(buf); iot_uart_write(OPENAT_UART_2, buf, strlen(buf)); } } } } //main函数 int appimg_enter(void *param) { //系统休眠 iot_os_sleep(10000); T_AMOPENAT_UART_PARAM uartCfg = {0}; BOOL err = 0; uartCfg.baud = OPENAT_UART_BAUD_115200; //波特率 uartCfg.dataBits = 8; //数据位 uartCfg.stopBits = 1; // 停止位 uartCfg.parity = OPENAT_UART_NO_PARITY; // 无校验 uartCfg.flowControl = OPENAT_UART_FLOWCONTROL_NONE; //无流控 uartCfg.txDoneReport = FALSE; //发送完成不通知 uartCfg.uartMsgHande = uart1_recv_handle; //回调函数 err = iot_uart_open(OPENAT_UART_1, &uartCfg); //初始化串口1 while (!err) { iot_debug_print("OPENAT_UART_1 open FALSE"); iot_os_sleep(1000); } uartCfg.uartMsgHande = uart2_recv_handle; //回调函数 err = iot_uart_open(OPENAT_UART_2, &uartCfg); //初始化串口2 while (!err) { iot_debug_print("OPENAT_UART_2 open FALSE"); iot_os_sleep(1000); } //创建一个任务 //iot_os_create_task(TestTask, NULL, 4096, 1, OPENAT_OS_CREATE_DEFAULT, "TestTask"); return 0; } //退出提示 void appimg_exit(void) { OSI_LOGI(0, "application image exit"); } ``` 查看输出,串口1和串口2都成功的接收到了正确的数据,并且成功格式化输出。 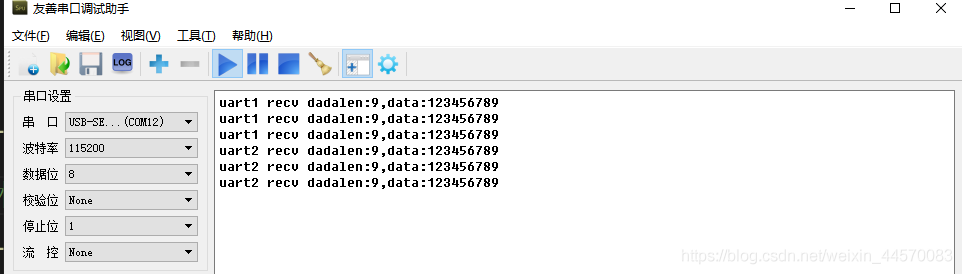 > 不会下载的[点击这里](https://blog.csdn.net/weixin_44570083/article/details/104285283),进去查看我的`RDA8910 CSDK二次开发入门教程`专题第一篇博文`1、RDA8910CSDK二次开发:环境搭建`里面讲了怎么下载 > 这里只是我的学习笔记,拿出来给大家分享,欢迎大家批评指正,本篇教程到此结束
发表于 2020-05-22 17:40
阅读 ( 2906 )
1 推荐
收藏
你可能感兴趣的文章
13、RDA8910CSDK二次开发:将你的代码藏起来----编译静态库
6680 浏览
1.1、RDA8910CSDK二次开发:CSDK极致开发体验
9187 浏览
12、RDA8910CSDK二次开发:c语言中最好用的JSON解析库---cJSON
7292 浏览
11、RDA8910CSDK二次开发:新鲜出炉的MQTT库
8879 浏览
10、RDA8910CSDK二次开发:简易的http通讯库
2687 浏览
9、RDA8910CSDK二次开发:趁热打铁干脆顺带把UDP通讯也给撸了吧
2653 浏览
相关问题
EVB_Air720UG_A12测试sdcard失败
0 回答
AIR724UG 固件下载失败
2 回答
模块无法接收到串口数据
0 回答
合宙Air724UG的USB驱动问题
1 回答
请教 air202f模块的串口接收问题,参考的demo完全和我想的不一样,出现一直接收空数据
1 回答
uart.read()函数能读取16进制数吗?
1 回答
0 条评论
请先
登录
后评论
陈夏
26 篇文章
作家榜
»
技术销售Delectate
43 文章
陈夏
26 文章
国梁
24 文章
miuser
21 文章
晨旭
20 文章
朱天华
19 文章
金艺
19 文章
杨奉武
18 文章
×
发送私信
发给:
内容:
×
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
