Toggle navigation
首页
(current)
问答
文章
话题
商城
登录
注册
9、RDA8910CSDK二次开发:趁热打铁干脆顺带把UDP通讯也给撸了吧
RDA8910
csdk
UDP
socket
# 目录 [点击这里查看所有博文](https://blog.csdn.net/weixin_44570083/article/details/104285283) 本系列博客所述资料`均来自合宙官方`,并不是本人原创(只有博客是自...
# 目录 [点击这里查看所有博文](https://blog.csdn.net/weixin_44570083/article/details/104285283) 本系列博客所述资料`均来自合宙官方`,并不是本人原创(只有博客是自己写的),csdk只是得到了`口头的允许公开授权`。出于热心,本人将自己的所学笔记整理并推出相对应的使用教程,方面其他人学习。为国内的物联网事业发展尽自己的一份绵薄之力,`没有为自己谋取私利的想法`。若出现侵权现象,请告知本人,本人会立即停止更新,并删除相应的文章和代码。 本系列博客基于紫光展锐的`RDA8910 LTE Cat 1` bis芯片平台开发。理论上适用于合宙的Air720U、Air724U、广和通L610以及安信可的cat-01模块。 各个厂家的部分配置文件可能不一样,也许会导致设备出现奇怪的问题,其他的模块我也不确定能不能用,自行测试。但是有一点`编译下载和监视流程基本一样`,可供参考。 先不管支不支持,如果你用的模块是是紫光展锐的RDA8910,那都不妨一试,也许会有意外收获(`也有可能变砖,慎重!!!`)。 我使用的是`Air724UG`开发板,如果在其他模块上不能用,那也不要强怼,也许是开发包不兼容吧。这里的代码是没有问题的。例程仅供参考! # 一、前言 上篇博客我们一起了解过tcp通讯之后,再来学习udp会轻松得多。程序基本是一样的,就改了几个传入的参数,上篇博客对应的实验要是做出来了,这篇udp的博客对于各位来讲想必不是什么问题。  udp和tcp之间最明显的区别就是udp是`无连接`的通讯,UDP是`点对点`的通讯,UDP通讯模式只要指定IP和端口就可以的,UDP服务`没有客户端和服务器的概念`,UDP是对等网络。tcp服务才有服务器和客户端的概念。UDP服务既可以主动给任何地址发消息,也可以被动接收任何地址传入进来的消息。(`注意:这里的服务端是指软件的状态,并不是指远程的服务器`)。  UDP服务没有客户端和服务器的概念并不是说没有UDP服务器(硬件)。将一个UDP的服务,运行在一台远端服务器上,那就是一个提供UDP服务的服务器。本系列教程的第7篇博客---RDA8910CSDK二次开发:[通过DNS解析迈向互联网的第一步](https://blog.csdn.net/weixin_44570083/article/details/106322945)就是一个`UDP服务`,通过向远端的UDP服务器请求解析数据获得网址对应的的ip。 # 二、编写测试程序 ## 2.1、了解本例程所用到的函数 使用udp服务需要包含`#include "iot_socket.h""`头文件,我们这里只用到了6个函数,分别是: >/**设置网络状态回调函数 *@param indCb: 回调函数 *@return TRUE: 成功 * FALSE: 失败 **/ * BOOL `iot_network_set_cb` (F_OPENAT_NETWORK_IND_CB indCb ) > /**创建socket *@param domain: 仅支持AF_INET (IPV4 网络协议) @param type: 支持SOCK_STREAM/SOCK_DGRAM,分别表示TCP、UDP连接 @param protocol: 仅支持0 *@return >=0: socket描述符,用于后续操作 * <0: 创建socket失败 *@note 创建的socket不用后需要用close将其关闭 **/ * int `socket`(int domain, int type, int protocol) > /**本地字节顺序转化为网络字节顺序(16bits) *@param n: 本地字节书序数据 *@return 网络字节顺序数据 **/ `htons`(n) ((n & 0xff) << 8) | ((n & 0xff00) >> 8) > /**将ip地址字符串转为数值,转化后的数值为网络字节顺序 *@param cp: ip地址字符串,例如"192.168.1.1" *@param addr: struct in_addr 返回的ip地址数值 *@return 1: 成功 * 0: 失败 **/ `inet_aton`(cp, addr) ipaddr_aton(cp, (openat_ip_addr_t*)addr) > /**发送数据到指定ip地址,一般用于udp发送数据 *@param socketfd: 调用socket接口返回的socket描述符 @param buf: 数据内容 @param len: 数据长度 @param flags: 仅支持0 @param to_p: 指定ip地址和端口号 @param tolen: sizeof(struct openat_sockaddr) *@return >=0: 实际发送的长度 * <0 发送错误 **/ * int `sendto`(int socketfd, const void *buf,size_t len,int flags, const struct openat_sockaddr *to_p, openat_socklen_t tolen) > /**接收指定ip地址发送来的数据,一般用于UDP收取数据 *@param socketfd: 调用socket接口返回的socket描述符 @param buf: 用于存放数据的缓存 @param len: buf的长度 @param flags: 仅支持0 @param addr: 支持ip地址和端口 @param addrlen: sizeof(struct openat_sockaddr) *@return >0: 接收到的数据长度 * =0: 对方已经断开连接 * <0: 读取错误 *@note 当flags没有设置MSG_DONTWAIT,该函数会阻塞,直到有数据或者读取超时 **/ * int `recvfrom`(int sockfd, void *buf, size_t len, int flags,struct openat_sockaddr *src_addr,openat_socklen_t *addrlen) * ## 2.2、编写主程序 主程序负责注册网络回调函数,以及创建一个消息处理函数。 ```c //系统休眠 iot_os_sleep(10000); //注册网络状态回调函数 iot_network_set_cb(NetWorkCb); //创建一个任务 //TestTask_HANDLE = TestTask_HANDLE = iot_os_create_task(TestTask, NULL, 2048, 10, OPENAT_OS_CREATE_DEFAULT, "TestTask"); return 0; ``` ## 2.3、编写网络回调函数 消息回调函数负责通知系统消息,最好不要在其中处理复杂的动作。我这里将系统消息转存到全局变量中,然后再任务中定时查询并处理其他的逻辑。 ```c static void NetWorkCb(E_OPENAT_NETWORK_STATE state) { NetWorkCbMessage = state; } ``` ## 2.4、编写消息处理任务 在消息处理函数中,定时查询全局变量转存的网络状态,进行相应的处理。网络正常后调用`UdpInit`建立套接字。执行完成后进行任务自毁。 ```c bool NetLink = FALSE; while (NetLink == FALSE) { T_OPENAT_NETWORK_CONNECT networkparam = {0}; switch (NetWorkCbMessage) { case OPENAT_NETWORK_DISCONNECT: //网络断开 表示GPRS网络不可用澹,无法进行数据连接,有可能可以打电话 iot_debug_print("[socket] OPENAT_NETWORK_DISCONNECT"); iot_os_sleep(10000); break; case OPENAT_NETWORK_READY: //网络已连接 表示GPRS网络可用,可以进行链路激活 iot_debug_print("[socket] OPENAT_NETWORK_READY"); memcpy(networkparam.apn, "CMNET", strlen("CMNET")); //建立网络连接,实际为pdp激活流程 iot_network_connect(&networkparam); iot_os_sleep(500); break; case OPENAT_NETWORK_LINKED: //链路已经激活 PDP已经激活,可以通过socket接口建立数据连接 iot_debug_print("[socket] OPENAT_NETWORK_LINKED"); NetLink = TRUE; break; } } if (NetLink == TRUE) { UdpInit(); } iot_os_delete_task(TestTask_HANDLE); ``` ## 2.5、编写UdpInit 这是一个子程序,网络连接正常后在消息处理函数中被调用,只会执行一次。首先创建一个套接字,判断创建是否正常。若创建套接字正常,继续创建两个任务,一个负责接收数据,一个负责发送数据。 ```c static void UdpInit() { //创建套接字,Udp连接 socketfd = socket(OPENAT_AF_INET, OPENAT_SOCK_DGRAM, 0); while (socketfd < 0) { iot_debug_print("[socket] create udp socket error"); iot_os_sleep(3000); } iot_debug_print("[socket] udp connect success"); iot_os_create_task(SentTask, NULL, 2048, 10, OPENAT_OS_CREATE_DEFAULT, "SentTask"); iot_os_create_task(RecvTask, NULL, 2048, 10, OPENAT_OS_CREATE_DEFAULT, "RecvTask"); } ``` ## 2.6、编写发送任务 在发送任务中,定时对建立的套接字做循环发送字符串的动作,并进行相应的次数标记。要注意的是,发送的时候需要带上远端设备网络连接结构体。 ```c struct openat_sockaddr_in udp_remote_addr = {0}; udp_remote_addr.sin_family = OPENAT_AF_INET; udp_remote_addr.sin_port = htons((unsigned short)UDP_REMOTE_PORT); inet_aton(UDP_REMOTE_IP, &udp_remote_addr.sin_addr); uint8 num = 0; int len = 0; char data[512] = {0}; while (1) { if (socketfd >= 0) { len = sprintf(data, "RDA8910 Sent:%d", num); data[len] = '\0'; iot_debug_print(data); if (len > 0) { // UDP 发送数据 len = sendto(socketfd, data, len + 1, 0, (const struct openat_sockaddr *)&udp_remote_addr, sizeof(struct openat_sockaddr)); if (len < 0) { iot_debug_print("[socket] udp send data False"); } else { iot_debug_print("[socket] udp send data Len = %d", len); num += 1; } } } iot_os_sleep(3000); } ``` ## 2.7、编写接收任务 在接收任务中,将接收的数据打印在日志中显示,recvfrom函数会陷入阻塞状态,直到接收到数据。程序中提供的测试服务端自带回环功能,会将接收的的数据原封不动返回。所以我们接收到的数据就是自己发送的数据。 ```c struct openat_sockaddr_in udp_remote_addr = {0}; openat_socklen_t udp_remote_len = 0; int len = 0; unsigned char data[512] = {0}; while (1) { if (socketfd >= 0) { // UDP 接受数据 len = recvfrom(socketfd, data, sizeof(data), 0, (struct openat_sockaddr *)&udp_remote_addr, &udp_remote_len); if (len < 0) { iot_debug_print("[socket] udp Recv data False"); } else { //发现获取不到远端ip和端口 iot_debug_print("[socket] udp Recv from ip:%s,port:%d", inet_ntoa(udp_remote_addr.sin_addr),ntohs(udp_remote_addr.sin_port)); iot_debug_print("[socket] udp Recv data result = %s", data); } } } ``` recvfrom函数接收到数据的时候会将远端连接结构体数据,写在传入的空结构体内,但是我们这个好像没什么用,不知道是不是我用错了,打印出来的远端ip的端口都是0。我看这函数的说明用的应该是没错的。 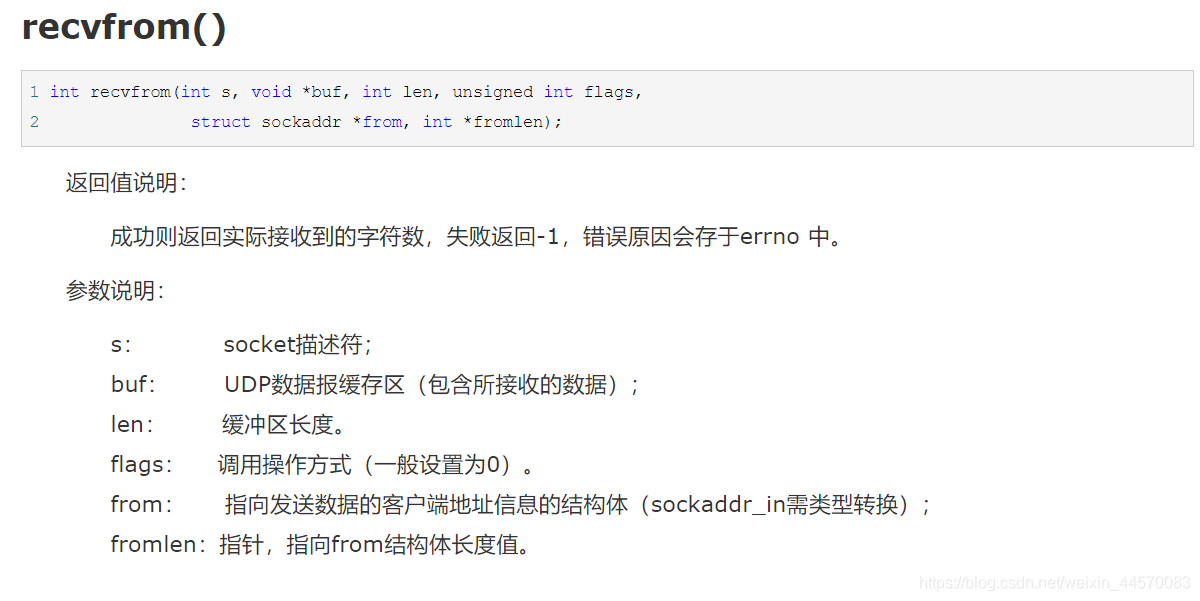 # 三、编译并下载程序 完整代码在这,自取。 ```c /* * @Author: your name * @Date: 2020-05-19 14:05:32 * @LastEditTime: 2020-05-26 21:50:08 * @LastEditors: Please set LastEditors * @Description: In User Settings Edit * @FilePath: \RDA8910_CSDK\USER\user_main.c */ #include "string.h" #include "cs_types.h" #include "osi_log.h" #include "osi_api.h" #include "am_openat.h" #include "am_openat_vat.h" #include "am_openat_common.h" #include "iot_debug.h" #include "iot_uart.h" #include "iot_os.h" #include "iot_gpio.h" #include "iot_pmd.h" #include "iot_adc.h" #include "iot_vat.h" #include "iot_network.h" #include "iot_socket.h" //Udp Demo //UDP模式指定IP和端口就可以的 //UDP服务没有客户端和服务器的概念,UDP是对等网络。tcp服务才有服务器和客户端的概念。 //错的人多了就变成对的了 //远端ip和port #define UDP_REMOTE_IP "121.40.170.41" #define UDP_REMOTE_PORT 12414 HANDLE TestTask_HANDLE = NULL; uint8 NetWorkCbMessage = 0; int socketfd = -1; static void SentTask(void *param) { struct openat_sockaddr_in udp_remote_addr = {0}; udp_remote_addr.sin_family = OPENAT_AF_INET; udp_remote_addr.sin_port = htons((unsigned short)UDP_REMOTE_PORT); inet_aton(UDP_REMOTE_IP, &udp_remote_addr.sin_addr); uint8 num = 0; int len = 0; char data[512] = {0}; while (1) { if (socketfd >= 0) { len = sprintf(data, "RDA8910 Sent:%d", num); data[len] = '\0'; iot_debug_print(data); if (len > 0) { // UDP 发送数据 len = sendto(socketfd, data, len + 1, 0, (const struct openat_sockaddr *)&udp_remote_addr, sizeof(struct openat_sockaddr)); if (len < 0) { iot_debug_print("[socket] udp send data False"); } else { iot_debug_print("[socket] udp send data Len = %d", len); num += 1; } } } iot_os_sleep(3000); } } static void RecvTask(void *param) { struct openat_sockaddr_in udp_remote_addr = {0}; openat_socklen_t udp_remote_len = 0; int len = 0; unsigned char data[512] = {0}; while (1) { if (socketfd >= 0) { // UDP 接受数据 len = recvfrom(socketfd, data, sizeof(data), 0, (struct openat_sockaddr *)&udp_remote_addr, &udp_remote_len); if (len < 0) { iot_debug_print("[socket] udp Recv data False"); } else { //发现获取不到远端ip和端口 iot_debug_print("[socket] udp Recv from ip:%s,port:%d", inet_ntoa(udp_remote_addr.sin_addr),ntohs(udp_remote_addr.sin_port)); iot_debug_print("[socket] udp Recv data result = %s", data); } } } } static void UdpInit() { //创建套接字,Udp连接 socketfd = socket(OPENAT_AF_INET, OPENAT_SOCK_DGRAM, 0); while (socketfd < 0) { iot_debug_print("[socket] create udp socket error"); iot_os_sleep(3000); } iot_debug_print("[socket] udp connect success"); iot_os_create_task(SentTask, NULL, 2048, 10, OPENAT_OS_CREATE_DEFAULT, "SentTask"); iot_os_create_task(RecvTask, NULL, 2048, 10, OPENAT_OS_CREATE_DEFAULT, "RecvTask"); } static void TestTask(void *param) { bool NetLink = FALSE; while (NetLink == FALSE) { T_OPENAT_NETWORK_CONNECT networkparam = {0}; switch (NetWorkCbMessage) { case OPENAT_NETWORK_DISCONNECT: //网络断开 表示GPRS网络不可用澹,无法进行数据连接,有可能可以打电话 iot_debug_print("[socket] OPENAT_NETWORK_DISCONNECT"); iot_os_sleep(10000); break; case OPENAT_NETWORK_READY: //网络已连接 表示GPRS网络可用,可以进行链路激活 iot_debug_print("[socket] OPENAT_NETWORK_READY"); memcpy(networkparam.apn, "CMNET", strlen("CMNET")); //建立网络连接,实际为pdp激活流程 iot_network_connect(&networkparam); iot_os_sleep(500); break; case OPENAT_NETWORK_LINKED: //链路已经激活 PDP已经激活,可以通过socket接口建立数据连接 iot_debug_print("[socket] OPENAT_NETWORK_LINKED"); NetLink = TRUE; break; } } if (NetLink == TRUE) { UdpInit(); } iot_os_delete_task(TestTask_HANDLE); } static void NetWorkCb(E_OPENAT_NETWORK_STATE state) { NetWorkCbMessage = state; } //main函数 int appimg_enter(void *param) { //系统休眠 iot_os_sleep(10000); //注册网络状态回调函数 iot_network_set_cb(NetWorkCb); //创建一个任务 //TestTask_HANDLE = TestTask_HANDLE = iot_os_create_task(TestTask, NULL, 2048, 10, OPENAT_OS_CREATE_DEFAULT, "TestTask"); return 0; } //退出提示 void appimg_exit(void) { OSI_LOGI(0, "application image exit"); } ``` 查看输出,发现接收到的数据和发送的数据一致,唯一的问题就是recvfrom获取不到远端的地址。 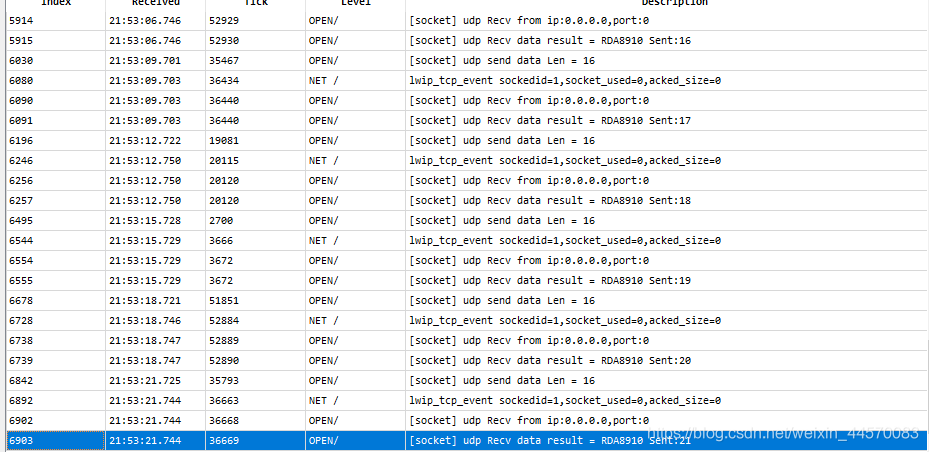 > 不会下载的[点击这里](https://blog.csdn.net/weixin_44570083/article/details/104285283),进去查看我的`RDA8910 CSDK二次开发入门教程`专题第一篇博文`1、RDA8910CSDK二次开发:环境搭建`里面讲了怎么下载 > 这里只是我的学习笔记,拿出来给大家分享,欢迎大家批评指正,本篇教程到此结束
发表于 2020-05-26 21:58
阅读 ( 2689 )
1 推荐
收藏
你可能感兴趣的文章
13、RDA8910CSDK二次开发:将你的代码藏起来----编译静态库
6743 浏览
1.1、RDA8910CSDK二次开发:CSDK极致开发体验
9237 浏览
12、RDA8910CSDK二次开发:c语言中最好用的JSON解析库---cJSON
7348 浏览
11、RDA8910CSDK二次开发:新鲜出炉的MQTT库
8917 浏览
10、RDA8910CSDK二次开发:简易的http通讯库
2718 浏览
相关问题
2G模块连接阿里云每隔3s上发一次数据,但是会报错出现连接重置,日志打出来是ssl连接被关闭,请问这是信号差的原因还是什么其他的原因?
0 回答
0 条评论
请先
登录
后评论
陈夏
26 篇文章
作家榜
»
技术销售Delectate
43 文章
陈夏
26 文章
国梁
24 文章
miuser
21 文章
晨旭
20 文章
朱天华
19 文章
金艺
19 文章
杨奉武
18 文章
×
发送私信
发给:
内容:
×
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
